近日,电子与信息工程学院硕士研究生吴剑豪作为第一作者,与其导师、圣彼得堡船舶与海洋技术学院刘畅教授(通信作者)以及俄罗斯科学院自动化与过程控制研究所的俄罗斯工程院院士Vladimir Filaretov和Dmitry Yukhimets合作,在国际水下机器人领域高水平期刊Robotics and Autonomous Systems(Q1,中科院二区,IF=5.2)发表了题为《Adaptive path planning method for multi-AUVs in complex environments》的学术论文。
该论文针对多自主水下航行器(AUV)在复杂未知海洋环境中协同路径规划与避障效率不足的问题,提出了一种自适应路径规划方法。研究引入深度强化学习与分布式协同学习机制,使多AUV在无全局环境信息条件下实现高效、安全的协同导航。实验结果表明,该方法相较于传统算法任务成功率提高了18.7 %,路径效率提高了29.6 %,响应时间减少了51.4 %,具有良好的工程应用前景。
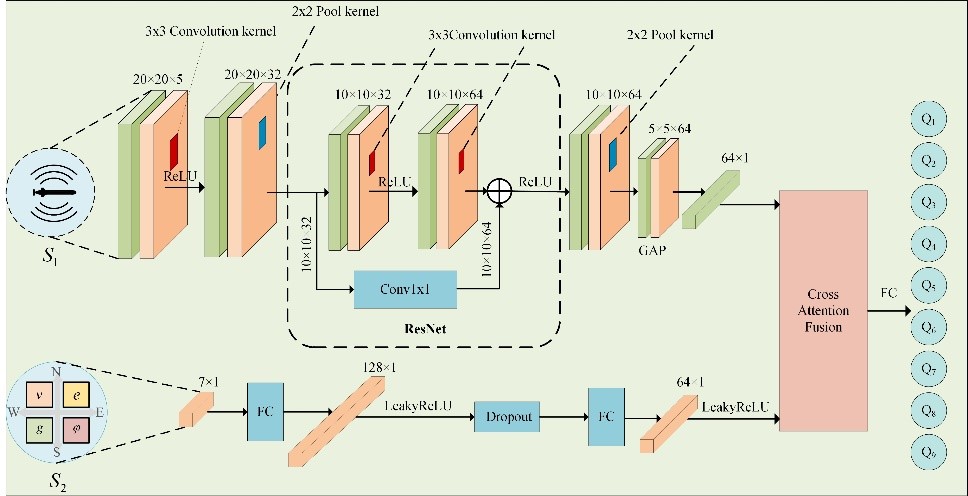
算法核心结构
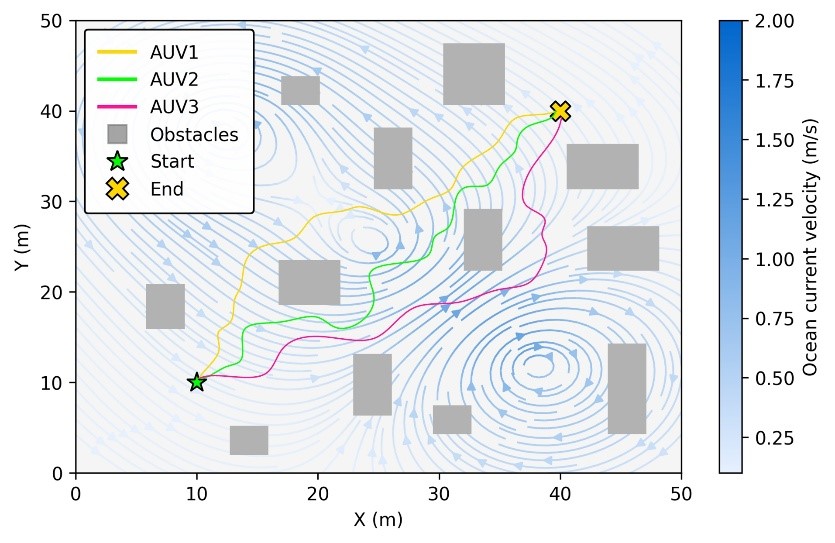
算法仿真效果
近年来,在刘畅教授的系统性指导下,研究团队围绕水下机器人协同控制与集群智能等关键技术持续攻关,积极推进中俄科研合作,依托共建的中俄水下机器人实验室开展前沿研究。团队在多AUV协同决策与自主导航领域取得的一系列成果,已逐步实现从理论到应用的转化。其中,相关技术已成功应用于北极航道智能探测与南海深远海环境监测等实际场景,有效提升了复杂海洋环境下作业的智能化水平与协同效率,展现出良好的工程适用性与应用潜力。
团队始终坚持科研与实践融合、平台与育人并重,将前沿课题贯穿于人才培养全过程。学生在参与技术研发与成果落地的过程中,不仅锻炼了解决复杂工程问题的创新能力,也拓宽了国际化科研视野。本项成果的发表,标志着团队在智能规划方向形成了持续创新的良性循环,也体现了我校通过高水平平台建设与学科交叉,在服务国家海洋战略与培养拔尖创新人才方面取得的扎实成效。
文章链接:https://authors.elsevier.com/c/1mFyp3HdG3sv5W
(撰稿:刘畅 编辑:吴鋆 审核:欧卫军)